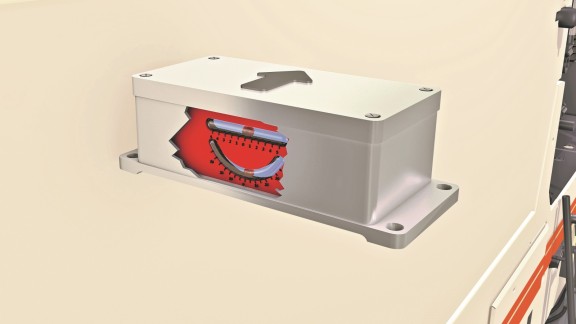
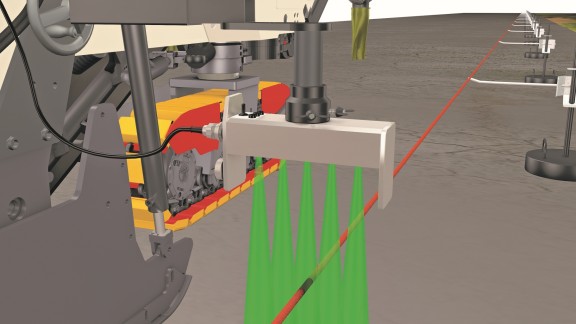
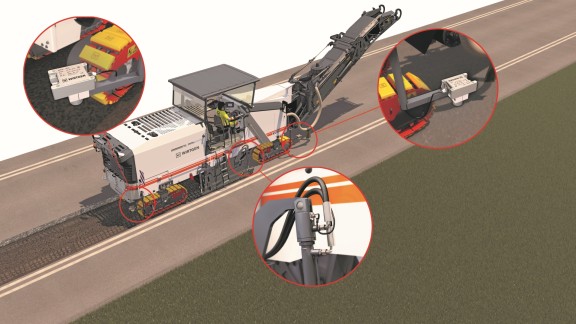
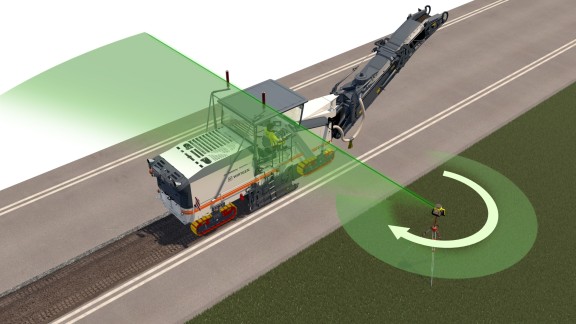
Sensors and probe components
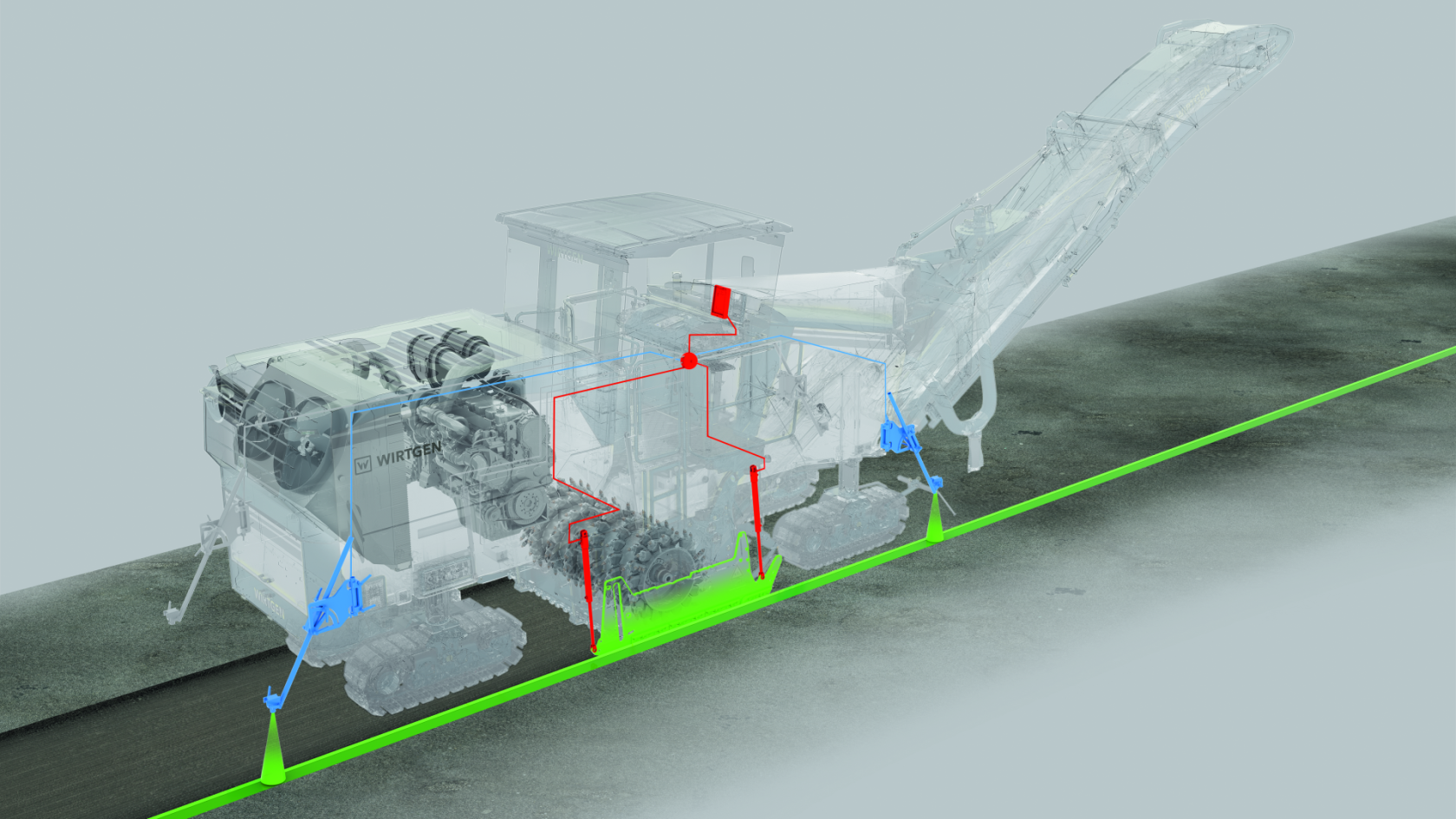
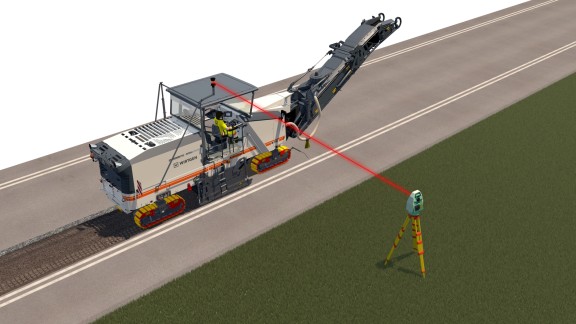
Deviations from the target value are acquired by sensors and computed by the leveling system. An appropriate machine correction is then automatically routed. Different sensors are used for different tasks as a function of the reference (e.g., roadway surface, curbside or stringline).
The sensors are essentially available for all product lines and machine types, and they are implemented according to the specific application.